当前进展总览
pick、place、open_door。labutopia_franka_smoke_clean8_20260622_1002081 skipped,validator 通过。本周完成了什么
| 事项 | 产品视角状态 | 说明 | 证据边界 |
|---|---|---|---|
| LabUtopia Franka POC | 已跑通 | 三个 POC 任务能在本地评测 server 中启动、reset、step、结束。 | 证明接入链路,不证明策略能力。 |
| 场景资产加载 | Franka POC 闭环 | 通过 manifest 把 LabUtopia overlay 资产根目录接入运行时,并映射对象名。 | 证明 scene overlay 可加载;不证明 reset 后布局或相机画面已验收。 |
| 结果生命周期 | 已修复 | 每个任务写 result_info.json,最终写 result.json,后处理异常 fail fast。 |
不会把后处理错误伪装成已完成。 |
| 并行任务隔离 | 已隔离 | LabUtopia 用 18088,EOS/其他工程师侧 8087 未被干扰。 |
run_id、worktree、端口均独立。 |
| 渲染图验收 | 任务渲染通过 | 当前三张 eval readback 图为非黑,且三任务最新正式诊断均为 render_validation.passed=true:pick 目标清楚,place 关系可读,open_door 关闭位为 0.0,门板、框架和细橙色把手可识别。 |
这证明 Franka POC 任务渲染门禁已过;P2 native complex DryingBox gate 也已补证通过。下一道硬门槛是 Lift2 复合资产和官方 runner gate。 |
资产加载是怎么做的
可以把资产加载理解成“任务配置只写短路径,运行时通过 manifest 找到真实资产仓库,再把对象名翻译成评测系统认识的名字”。这让任务包保持轻量,也避免把大资产直接放进代码仓库。
scene_usds/labutopia/level1_poc/lab_001/scene。configs/tasks/ebench/labutopia_lab_poc/common/assets_manifest.json。ASSETS_DIR 指到 LabUtopia overlay。scene.usda 文件并加载进 Isaac Sim。beaker2 映射成 obj_beaker2 供 evaluator 使用。已经闭环的部分
LabUtopia 场景 overlay 能被 Franka POC 加载,相关对象名能通过运行时对象映射进入 evaluator。P1 后,静态 USD 坐标已经归一到工作区,门把手保留为干燥箱内部子路径,三任务任务渲染门禁也已通过。P2 后,open_door 已经改用 LabUtopia native complex DryingBox_01,并在 EBench eval readback 中看到原生箱体和 nested handle。这证明接入路径、静态资产组织、native DryingBox wrapper 和任务读图链路已经在 Franka POC 内闭环;它不证明策略成功或官方 Lift2 baseline 可评。
还没闭环的部分
native DryingBox 的 Franka POC gate 已通过,但官方 baseline 仍未闭环。下一步要把 LabUtopia overlay、默认 robot_usds/lift2 和默认 miscs/curobo 组成 Lift2 candidate 资产根目录,做 composite asset preflight、Lift2 dry smoke 和官方 runner discovery;这些通过前仍保持 official_baseline_evaluable=false。
EBench 加载后的三任务渲染图
2026-06-23 到 2026-06-24 复核结论:旧图、P1 对照图和 P2 native 图都放在这里,方便做前后对照。旧图是历史失败样例,用来说明最开始“相机拍不到、资产位置不对、任务目标看不懂”的问题;P1 图来自正常 EBench/evaluator camera readback,用来说明我们已经把底层链路推进到“能拍到真实场景、能看懂任务目标”;P2 图进一步证明 open_door 已经回到 LabUtopia native complex DryingBox_01。当前结论是 Franka POC native gate 已通过;官方 Lift2 baseline 仍未验证,所以不能把这些图直接说成 baseline 成绩证据。
旧图要表达的问题
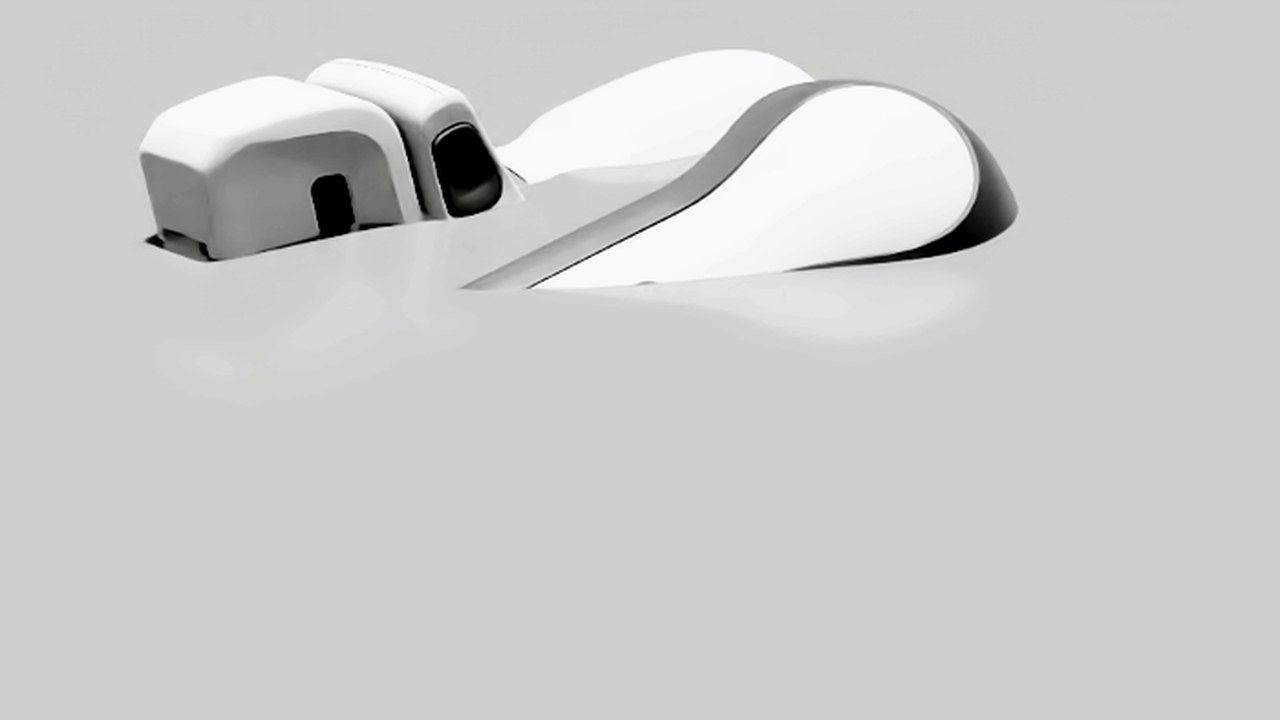
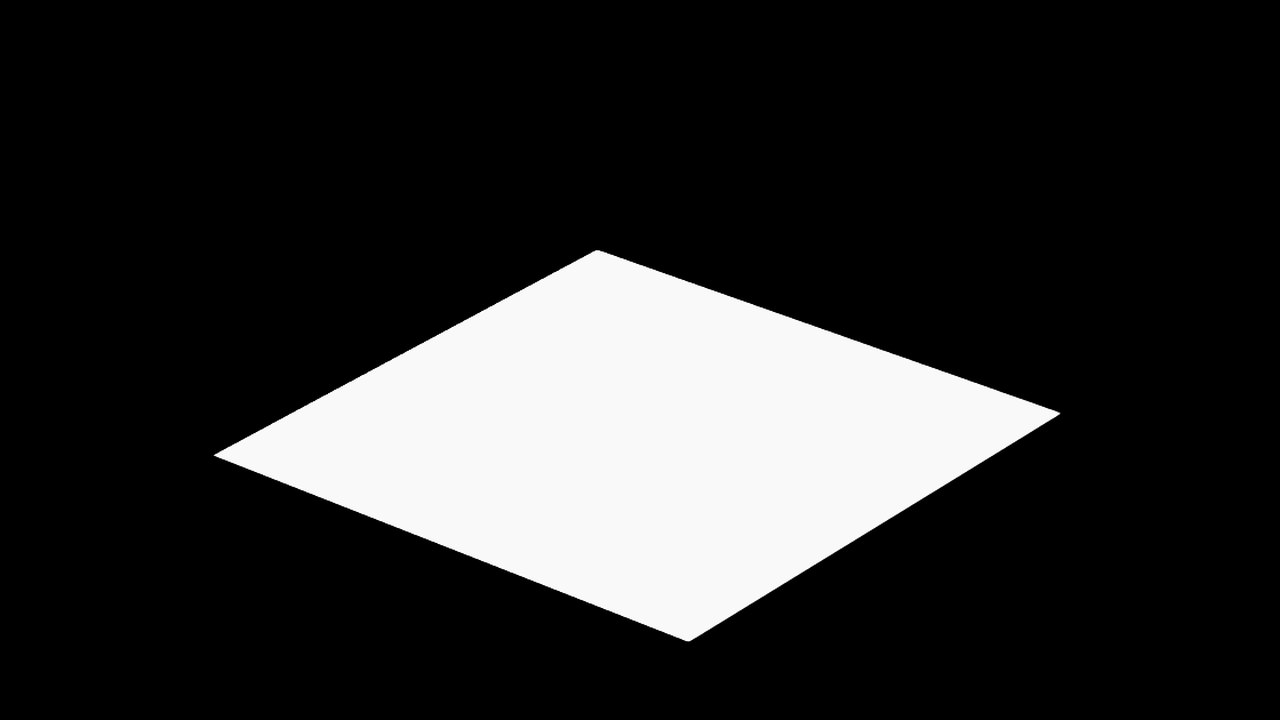
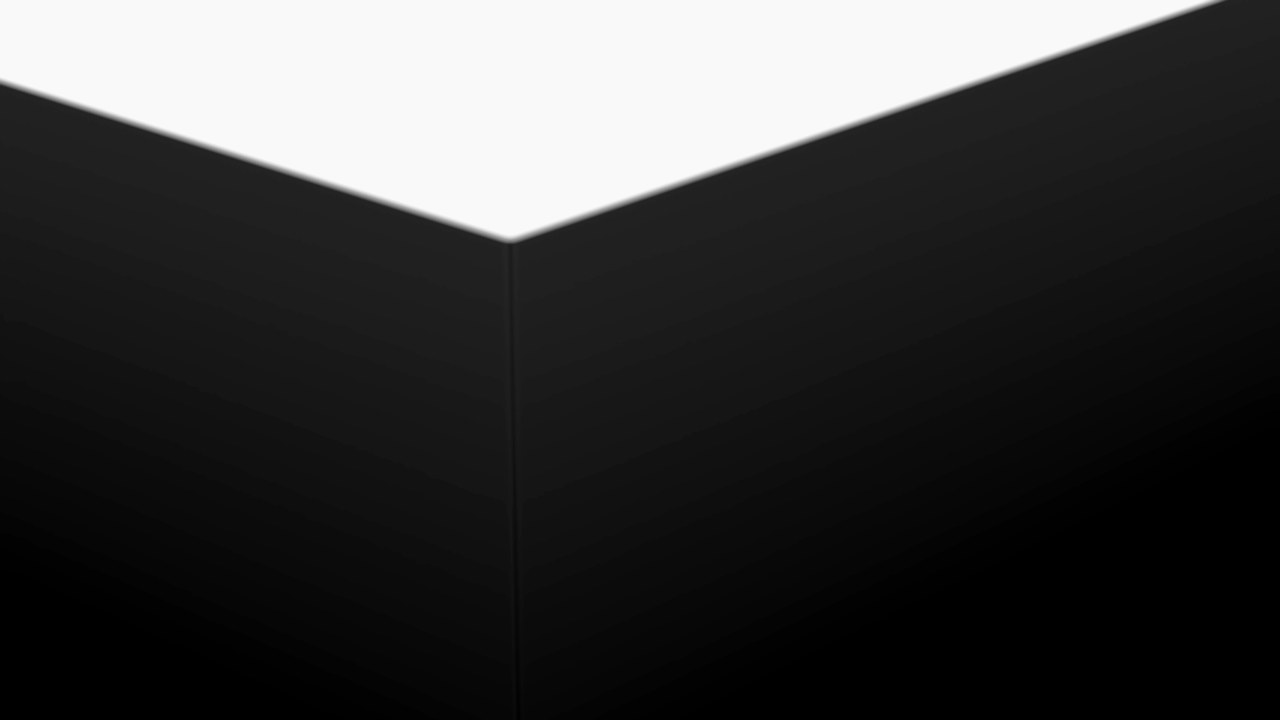
旧图的核心问题不是“画面不够漂亮”,而是“看图不能判断任务是否成立”:抓取图像白色设备局部,不像要抓的蓝色瓶;放置图只剩黑背景和白色平面,看不到要放的物体;开门图只拍到黑色箱体角,看不到门、把手和动作点。这类图只能说明我们曾经拍到过某个局部,不能说明 EBench 评测链路已经可用。
我们是怎么解决的
先修相机和光照,让评测相机真的能读回画面;再把瓶子、烧杯、托盘、干燥箱从原始实验室坐标搬回 Franka 工作区;然后按任务隐藏无关物体。对 open_door,P1 额外做了 sanitized_surrogate 对照组:固定底座、只保留一个门关节、对齐铰链;随后补关节初始目标回放,把把手移到非铰链侧,删除额外橙色块,并换成正面任务相机。P2 则回到 LabUtopia native complex DryingBox_01,保留原生 visual/hierarchy/handle,只用 additive physics override 修 root scale、fixed base、mass/inertia、joint target 和非任务 DOF。更系统的解释见 USD articulation 与 DryingBox 门问题教学页。
渲染证据状态
当前三任务均为 readback_visible 且 render_validation.passed=true。最新任务级隐藏后,level1_pick 只保留抓取瓶子,目标清楚;level1_place 同时保留烧杯和黄色目标托盘,任务关系可读;level1_open_door 已从 P1 surrogate baseline 推进到 P2 native complex DryingBox_01 readback,原生箱体和橙色 nested handle 可见。诊断 claim boundary 已升级为 native_complex_dryingbox_ready=true、task_render_accepted=true,但 official_baseline_evaluable=false。
旧图:历史失败样例
这三张旧图不是最终验收图。它们的问题很直观:像是在看一个没摆好的舞台,有的只拍到局部,有的看不到任务目标,有的看不出机器人到底要抓、放还是开门。更关键的是,旧图不是稳定的 eval-path 证据,不能代表模型评测时真实看到的画面。
旧图问题怎么解决
| 任务 | 旧图问题 | 已经做的修复 | 现在还差什么 |
|---|---|---|---|
level1_pick |
旧图里抓取目标不明显,PM 只看图无法判断“要抓哪个瓶子”。 | 修正 eval camera readback、相机朝向、光照,把瓶子归一到 Franka 工作区,并在 pick 任务里隐藏烧杯、托盘、干燥箱等非目标物体。 | 当前新图已经能让 PM 看懂“抓这个蓝色瓶子”,并已通过任务渲染门禁;后续进入 Lift2 baseline 资产和 runner 验证。 |
level1_place |
旧图看不出源物体和目标托盘的关系,不像一个“把东西放到哪里”的任务。 | 修正托盘、烧杯、瓶子坐标和颜色标记,并在 place 任务里隐藏瓶子和干燥箱,只保留烧杯与目标托盘。 | 当前新图能看懂“把烧杯放到黄色托盘附近”,并已通过任务渲染门禁;后续可再做展示级相机 polish,但这不是 baseline 阻断项。 |
level1_open_door |
旧图看不清干燥箱门和门把手,无法判断开门动作目标。 | 把门把手恢复为干燥箱内部子部件,不再作为独立物体飞走;同时生成 P1 sanitized_surrogate 对照组,固定底座并只保留一个门关节;再补关节初始目标回放、把手位置修正、删除重复橙色块和任务专用正面相机。背景解释见 门问题教学页。 |
P1 证明门任务可读;P2 已回到 LabUtopia native complex DryingBox_01,原生箱体和 nested handle 在 EBench readback 中可见。下一步进入 Lift2 复合资产和官方 runner gate。 |
已经解决了什么
先把黑屏定位到相机 readback,不是 recorder 写盘;然后修了 camera axes/pose 和确定性光照。接着把 LabUtopia 原始坐标里的瓶子、烧杯、托盘、干燥箱归一到 Franka 工作区,并把门把手恢复成干燥箱内部子部件。最后按任务隐藏非目标资产,让 pick/place 的图不再被无关物体干扰。
还没解决什么
open_door native complex DryingBox_01 已经通过 Franka POC gate,但官方 baseline lane 还没过。也就是说,我们已经解决“图能不能加载、能不能看懂任务”和“原生复杂门能不能稳定进入 EBench”的 POC 问题;下一步要解决“能不能按官方 Lift2 方式评”。
新图:当前 EBench eval readback
这三张是当前更可信的诊断图,因为它们来自 evaluator camera readback。它们证明底层加载、任务级构图和相机读回已经闭环到任务渲染门禁;剩余风险在官方 baseline 资产组合和 runner 验证。
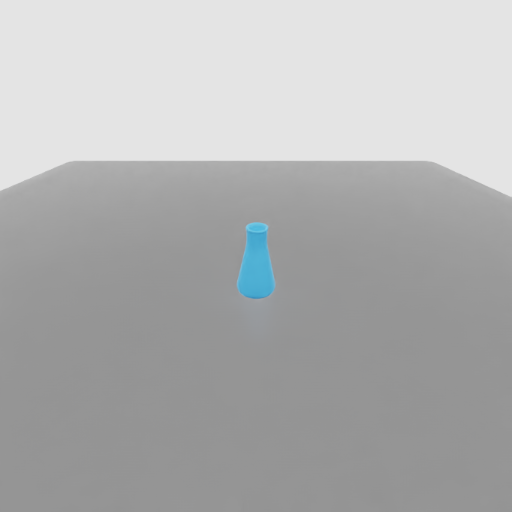
render_validation.passed=true。source: saved/diagnostics/labutopia_p1_gate_pick_formal_20260624_0001/readback_after_get_eval_camera_data/camera2/00000.png
render_validation.passed=true。source: saved/diagnostics/labutopia_p1_gate_place_formal_20260624_0001/readback_after_get_eval_camera_data/camera2/00000.png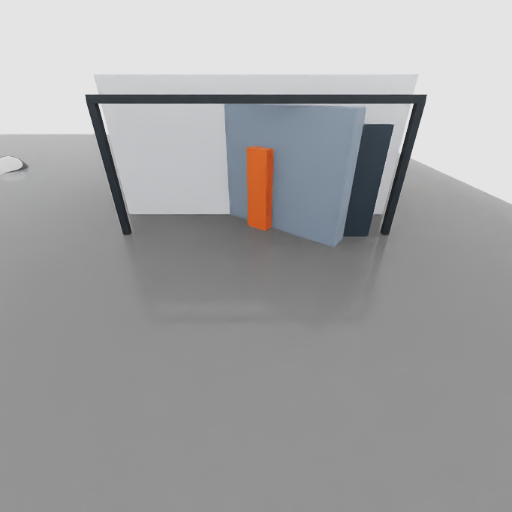
RevoluteJoint,关节位置已回到期望关闭位 0.0;门板、框架和细橙色把手在同一 evaluator readback 图里可见,诊断门禁 render_validation.passed=true。source: saved/diagnostics/labutopia_p1_gate_open_door_formal_20260624_0002/readback_after_get_eval_camera_data/camera2/00000.pngopen_door:旧图、P1 surrogate、P2 native 三阶段证据
这组三张图只回答“资产和任务图是否能被 EBench 看懂”。旧图说明早期失败在哪里;P1 图证明我们把 eval readback、门关节和把手可读性稳定下来;P2 图证明同一条链路已经回到 LabUtopia native complex DryingBox_01,不是继续依赖 cube-based surrogate。
RevoluteJoint,关节读数回到 0.0 rad,门板/框架/细把手可读。它证明 EBench eval readback 链路和任务构图过关。
additive physics override;正式诊断为 native_complex_dryingbox_ready=true、task_render_accepted=true。source: saved/diagnostics/native_dryingbox_open_door_eval_explicit_20260624_093156/readback_after_get_eval_camera_data/camera2/00000.png验证证据
| 证据项 | 结果 | 说明 |
|---|---|---|
| run_id | labutopia_franka_smoke_clean8_20260622_100208 |
独立 smoke 运行记录。 |
| episode 完成度 | 3/3 complete | level1_pick、level1_place、level1_open_door 均结束并写入结果。 |
| score / sr | 0.0 |
默认动作 smoke 的预期结果,只说明链路,不说明求解能力。 |
| render smoke | labutopia_franka_render_smoke_20260622_150819 |
同一任务包跑过保存帧 smoke;eval recorder 的 camera2 帧为纯黑,后续 runtime 诊断确认黑帧发生在 get_eval_camera_data() 后、recorder 写盘前。 |
| render diagnostics | P1 gate passed |
旧诊断:三个任务均为 readback_black_before_recorder。P1 最新正式诊断:三个任务均为 readback_visible 且 render_validation.passed=true;open_door 已从爆值和大橙色块修到关闭位正确、门板/框架/细把手可见。 |
| P0a/P0b manifest | pick/place visible |
render_p0a_p0b_20260623.json 记录 camera axes/pose、deterministic light 和 pick/place 非黑 readback。 |
| P1 asset/layout manifest | 3/3 task render pass |
render_p1_asset_layout_20260623.json 记录三任务 eval readback 图、静态 USD 坐标、任务级隐藏、open_door 细把手修复和 official baseline 未验证边界。 |
| Native DryingBox audit | audit PASS |
saved/diagnostics/native_dryingbox_audit_20260624_091136/audit.json,SHA256 e6eab4a6fc6a6b3ddddbabc2717a674c606c83255467db8b97bfbdac085aad4d。用途是确认原生 DryingBox_01 的 hierarchy、joint、handle 和物理风险点。 |
| Native-only Isaac smoke | runtime stable |
saved/diagnostics/native_dryingbox_smoke_20260624_091152/smoke.json,SHA256 fdab719564440d8528623785b55662acb38b74cf607d249dce963885082664a4。用途是在进入 EBench 前确认 native DryingBox runtime 物理状态有限稳定。 |
| Native open_door eval readback | native_complex_dryingbox_ready=true |
saved/diagnostics/native_dryingbox_open_door_eval_explicit_20260624_093156/diagnostics.json,SHA256 f28451fe121e43ac48c2e4b25ce28dfe395ee09e570318017c45cdfb2257225e。正式结论:boundary_classification=readback_visible、runtime_physics_stable=true、task_render_accepted=true、official_baseline_evaluable=false。 |
| visual QA | PASS / PASS / PASS |
pick 目标瓶清楚,place 烧杯和目标托盘关系可读;open_door 已有 P1 surrogate 和 P2 native 两张 readback 证据。这个 PASS 只覆盖任务渲染图,不等于策略得分或官方 baseline 成绩。 |
| report display QA | passed |
Playwright/Chromium 桌面、平板、移动端长截图已通过;周报 9 张图片、教程 3 张图片全部加载,旧图/P1 surrogate/P2 native 三阶段证据、native gate 通过和 official baseline 未验证边界文案都存在,无请求失败、console error 或横向溢出。证据在 /tmp/labutopia_task6_browser_review_20260624/audit.json。 |
| pytest | 64 passed, 1 skipped |
覆盖资产 override、fallback metadata、结果落盘、后处理 fail-fast 和 render diagnostic 合同等回归点。 |
| diagnostic contract | 13 passed |
纯 Python 帧统计和黑帧分类接口不依赖 Isaac,可快速回归。 |
| package validator | LabUtopia task package validation OK |
任务包、manifest、camera cleanup 配置通过静态校验。 |
| 端口隔离 | 18088 closed, 8087 online |
没有和 EOS/其他工程师正在跑的任务混淆。 |
问题和处理结果
| 问题 | 表现 | 处理方式 | 当前状态 |
|---|---|---|---|
| 资产根目录不对 | 系统一开始会去默认目录找 LabUtopia 场景。 | 增加 LabUtopia manifest 识别逻辑,运行时切换 overlay asset root。 | 已解决 |
缺少 meta_info.pkl |
传统采集包依赖的 metadata 在 LabUtopia POC 中不存在。 | 从实时场景自动生成最小可用 metadata。 | 已解决 |
| camera cleanup 字段缺失 | 切换任务时 camera 清理报字段错误。 | 补齐 POC camera 配置 cleanup flags。 | 已解决 |
| eval recorder camera2 黑屏 | 保存过程帧时 camera2 输出为黑屏。 |
已修 camera axes/pose、deterministic lighting 和工作区相机;P1 三任务均能从 eval camera 读回非黑图。 | 黑屏解除 |
| 旧图不可作为验收证据 | 旧图看不清任务目标,也不是稳定 eval-path 证据。 | 旧图保留为历史失败样例;新图改用正常 evaluator readback,并清楚标注哪些已可读、哪些仍 blocked。 | 已解释清楚 |
| 当前任务图验收边界 | pick 已清楚,place 关系可读;open_door 已能读回且关闭位正确,门板/框架/细把手可识别。 |
已用正式任务渲染门禁签收三任务;P2 又补上 native complex DryingBox_01 的 EBench readback 证据。下一步转入 Lift2 baseline 所需的复合资产和官方 runner gate。 |
任务渲染/native gate 通过 |
| 资产导入/layout 静态坐标 | 早期对象在源 lab 坐标,门把手会像独立物体一样飞到远处。 | P1 已把对象归一到 Franka 工作区,并把 handle 保留为 DryingBox 内部子路径。 | 静态层已推进 |
open_door runtime 物理不稳定 |
旧版本 runtime articulation joint position 爆到 1.573e13,并伴随 PhysX transform warning。 |
P1 已用稳定的 DryingBox sanitized_surrogate 修复爆值和关闭位;P2 已把稳定性迁移到 LabUtopia native complex DryingBox_01,并通过 native_dryingbox_open_door_eval_explicit_20260624_093156 读回验证。 |
native gate 已通过 |
| 最终进度不 complete | 任务已跑完,但客户端等待最终结果直到超时。 | 任务结束时写最小 result_info.json 并修复进度统计。 |
已解决 |
| 后处理异常可能被误记为完成 | 异常路径不能用 0 分兜底伪装为成功。 | 增加 fail-fast 逻辑和回归测试。 | 已解决 |
Claim Boundary
现在可以说
- LabUtopia Franka POC 已经能通过 GenManip/EBench server-client 链路本地跑完。
- 三个 level-1 任务能完成 reset/step/finalize,并生成 per-task 和 final result。
- Franka POC 的 LabUtopia scene overlay 加载路径已经验证。
- 旧图问题已经明确:看不清任务目标,也不是稳定 eval-path 证据。
- 黑帧边界已经定位到 camera readback 之后、recorder 写盘之前。
- P1 后,三任务 eval
camera2都已从纯黑变为非黑 readback。 - 静态 USD 坐标和门把手层级已经明显推进,handle 不再作为独立飞走物体。
- 任务级隐藏后,
pick和place的当前诊断图已经能让 PM 看懂目标和关系。 - P1 最新正式诊断中三任务
render_validation.passed=true,可以说任务渲染门禁已通过。 - 可以说
open_door的 P1sanitized_surrogate对照组稳定了关节读数和 readback 证据。 - 可以说 P2 已把
open_door回到 LabUtopia native complexDryingBox_01,原生 visual/hierarchy/nested handle 保留,native_complex_dryingbox_ready=true。
现在不能说
- 不能说任务已经求解成功,当前默认动作得分是
0.0。 - 不能说官方 Lift2 baseline 已经可评,Lift2 复合资产和官方 runner 还没闭环。
- 不能把当前任务渲染 PASS 或 native gate PASS 等同于策略成功率、官方分数或官方 baseline 成绩。
- 不能说当前 P2 native readback 复现了 LabUtopia viewer 的原生展示视角;它是 evaluator camera 的任务证据图。
- 不能说已经跑过 EBench 官方 Lift2 baseline;当前闭环的是 GenManip/EBench 本地任务渲染门禁和 Franka POC native DryingBox gate。
接下来几步
Camera readback 源头修复
已完成 camera axes/pose、deterministic lighting 和工作区相机修复;三任务已经非黑。
静态资产/layout 正规化
已把任务对象归一到 Franka 工作区,保留 nested handle transform,并用静态 USD 校验 object center/bounds/scale/light。
open_door 视角和门缝增强
物理爆值和关闭位问题已在 P1 sanitized_surrogate 对照组里通过关节目标回放解决;P2 已把同一套稳定性迁移到 LabUtopia native complex DryingBox_01,通过 EBench readback 证明原生箱体和 nested handle 可见。
任务级相机/构图
pick/place/open_door 已完成任务级相机与构图复验,三任务 render_validation.passed=true;后续构图调整只作为展示 polish,不作为 P1 阻断项。
Eval-path 重拍验收
已用正常 evaluator/readback 路径重新抓关键帧,写入 evidence manifest;三任务任务渲染门禁已通过。后续只做展示级 polish 或复验,不再作为 P1 阻断项。
Native complex DryingBox gate
已完成 asset audit、native-only Isaac smoke、EBench wrapper、additive physics override 和 open_door eval readback;当前 evidence boundary 是 native_complex_dryingbox_ready=true、official_baseline_evaluable=false。
Lift2 资产预检
下一步构建复合资产根目录:LabUtopia scene overlay + 默认 robot_usds/lift2 + 默认 miscs/curobo,并留下 preflight JSON/hash。
Lift2 dry smoke
在独立端口运行 lift2_candidate,要求 3/3 complete,但仍保持 official_baseline_execution=false。
官方 runner 发现
定位官方 EBench/OpenPI/Lift2 runner 文件,记录路径、hash 和入口,不直接执行策略。
官方式本地尝试
只有 P5 过后,才做一轮官方风格 online loop,并保留 terminal evidence。
相关文档
| 文档 | 用途 | 链接 |
|---|---|---|
| Markdown 周报 | 文字版 PM 汇报。 | 打开 |
| Franka smoke 记录 | 本次 smoke 的 run_id、命令、结果路径。 | 打开 |
| Franka render smoke 记录 | 三任务失败渲染样例、camera2 黑屏和 readback 边界。 | 打开 |
| Render visual investigation | 6/23-6/24 多角度复核:旧图问题、P0 黑屏修复、P1 静态资产归一、任务级隐藏后的新 eval readback 图、open_door 细把手修复和 baseline 边界。 | 打开 |
| Render diagnostics manifest | 三任务 runtime 诊断、帧 hash、claim boundary 和 layout red flags。 | 打开 |
| P0a/P0b render manifest | camera axes/pose、deterministic light 和 pick/place 非黑 readback 证据。 | 打开 |
| P1 asset/layout manifest | 三任务 eval readback 图、静态 USD 坐标、任务级隐藏、open_door 关闭位、细把手正面诊断和 official baseline 未验证边界。 | 打开 |
| Render/layout closure plan | P0-P2 修复计划:camera 诊断、reset 布局、eval-path 重拍和视觉 QA。 | 打开 |
| Native DryingBox plan | P2 七步 gate:asset audit、native-only Isaac smoke、EBench wrapper、additive physics override、open_door eval readback、文档证据和 Lift2 gate。 | 打开 |
| USD articulation 门教学页 | 面向 PM 解释 surrogate baseline、native complex DryingBox、USD articulation 和 claim boundary。 | 打开 |
| Lift2 baseline lane plan | 仿 EOS 的 P0-P4 证据门推进计划。 | 打开 |
| POC status plan | 本周 POC 状态和环境决策。 | 打开 |